Sarkaç Hareketi (Pendulum)
Sarkaç, fizikteki en klasik örneklerden biridir: bir ipin ucuna bağlı bir ağırlık, yerçekimi etkisiyle ileri-geri sallanır. Bu hareket aslında basit harmonik harekettir (küçük açılar için).
💡 Neden Sarkaç Önemli?
Saatlerden sensörlere, müzik metronomlarından fizik deneylerlerine kadar sarkaçlar her yerde kullanılır. Ayrıca kuvvet tabanlı simülasyonlar için harika bir örnek!
Sarkaç Fiziği (Pendulum Physics)
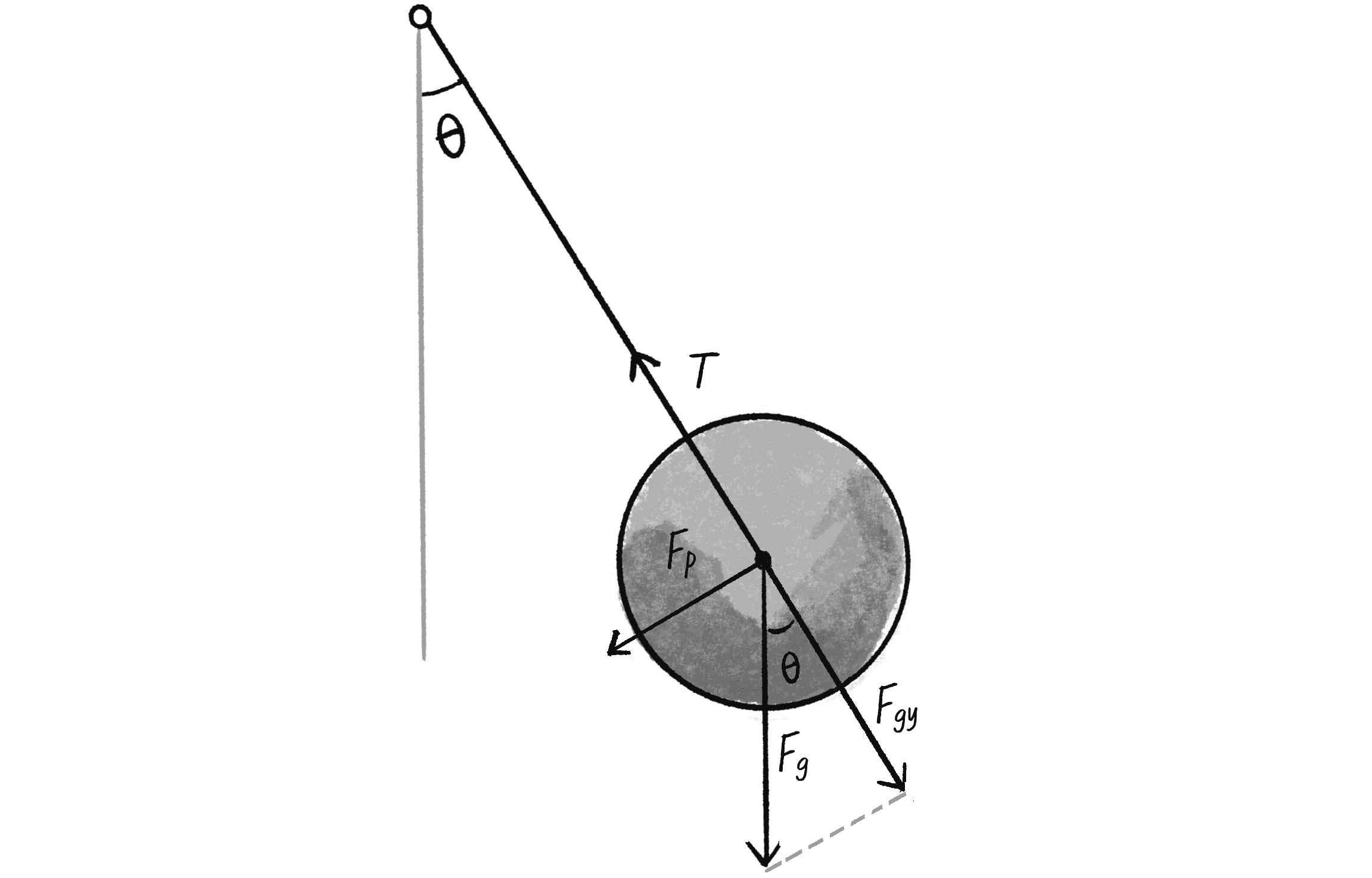
Sarkaç üzerinde iki ana kuvvet etkir:
m × g
Sarkaç hareketi için önemli olan, yerçekiminin teğetsel bileşenidir (salınım yönündeki bileşen):
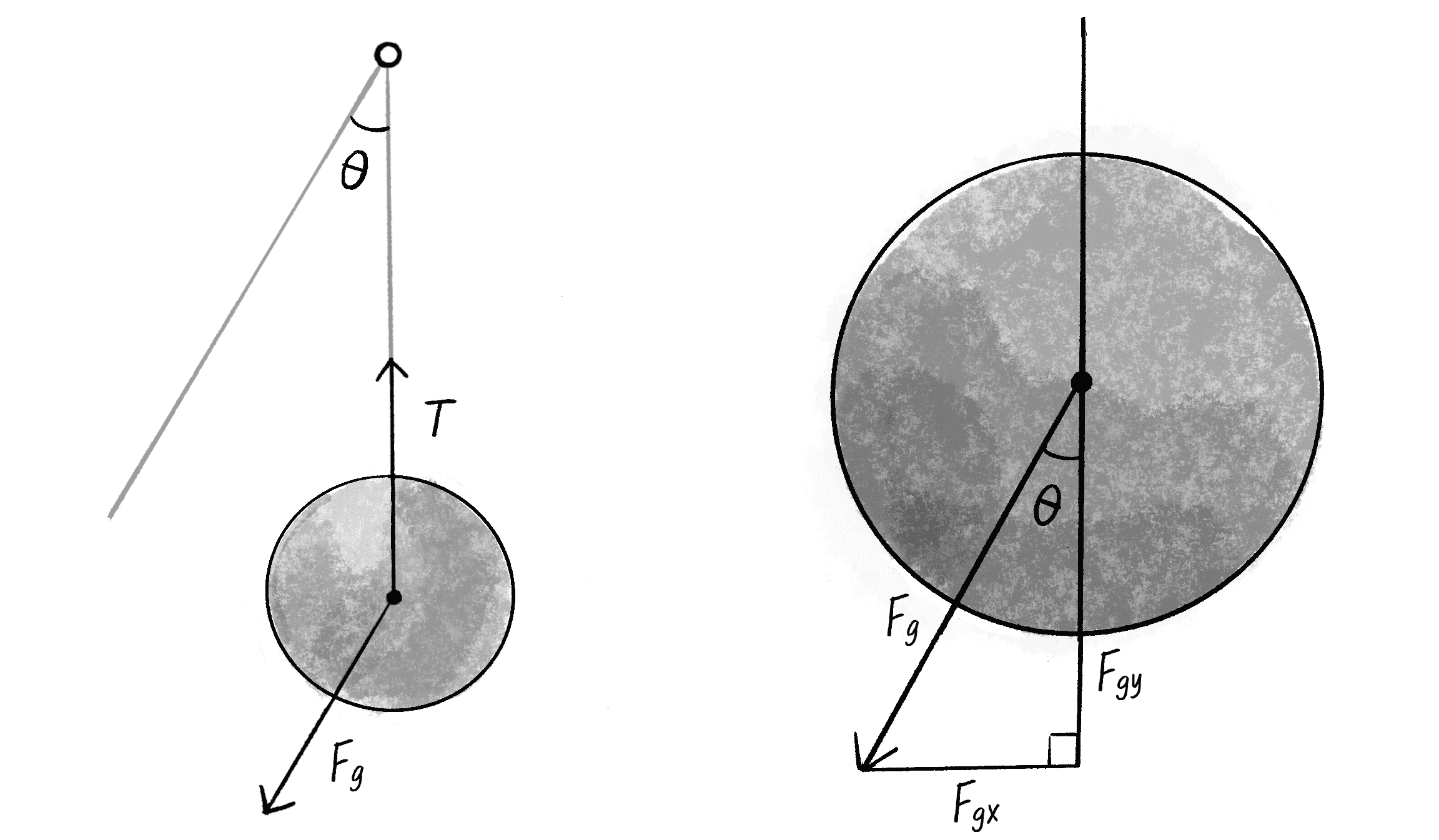
Newton'un 2. yasası ile açısal ivmeyi bulabiliriz:
🎮 Simülasyonda Sadeleştirme
Gerçek dünyada g ≈ 9.8 m/s². Simülasyonda piksel kullandığımız için
g değerini istediğimiz gibi ayarlayabiliriz.
Genellikle 0.4 - 1.0 arası değerler iyi sonuç verir.
Basit Sarkaç Örneği
Önce en basit haliyle sarkaç kodlayalım:
Satır Satır Açıklama:
angle mevcut açı,
angularVelocity açısal hız,
r ip uzunluğu, gravity yerçekimi.
damping enerji kaybını simüle eder.
Gerçek dünyada sürtünme ve hava direnci yüzünden sarkaç yavaş yavaş durur.
🔬 Deneyin:
-
Satır 5:
gravity = 1.0yapın. Beklenti: Daha hızlı salınım (güçlü yerçekimi) -
Satır 3:
r = 200yapın. Beklenti: Daha yavaş salınım (uzun ip) -
Satır 21:
damping = 1.0yapın. Beklenti: Sarkaç hiç yavaşlamaz (enerji kaybı yok)
Pendulum Sınıfı (Pendulum Class)
Birden fazla sarkaç veya etkileşimli sarkaç için bir sınıf oluşturalım:
Sınıf Özellikleri:
İleri Seviye: Çift Sarkaç (Double Pendulum)
Bir sarkacın ucuna başka bir sarkaç bağlarsak çift sarkaç elde ederiz. Bu sistem kaotik davranış gösterir - küçük başlangıç farkları tamamen farklı hareketlere yol açar!
⚠️ Kaos Teorisi
Çift sarkaç, "deterministik kaos" için klasik bir örnektir. Denklemler tam olarak bilinmesine rağmen, başlangıç koşullarındaki minik farklılıklar zamanla büyük farklara yol açar (kelebek etkisi).
📝 Bu Bölümün Özeti
- Sarkaç: İpe bağlı ağırlık, yerçekimi ile salınır
- α = -(g/L) × sin(θ): Açısal ivme formülü
- Damping: Enerji kaybı (sürtünme simülasyonu)
- Bob: Sallanan ağırlık
- Pivot: İpin bağlı olduğu sabit nokta
- Çift Sarkaç: Kaotik hareket örneği